Uit de neus werden twee grote zware MPX servo's uitgehaald. Twee kleinere werden meer achterin geplaatst. Door open zagen van het kielvlak kon ik de koppeling met het hoogteroer los maken en zo de bestaande stuurbalk en stuurkabel her gebruiken. Helaas heb ik niet zorgvuldig genoeg de stangen aan de balk gebogen zodat bij grote roeruitslag de stangen gaan wringen tegen de romphuid. De stuurkabel van het richtingsroer kon ik niet goed vastzetten midden in de romp waardoor deze kabel bij grote uitslagen wegslaat tegen de romp. Beide verdienden eigenlijk een betere montage.
De neus werd afgeslepen en een 3 mm triplex schotje met voor geboorde gaatjes werd met Epoxy Steel ingelijmd.
Een NTM 2836 1000kv motor werd ingebouwd met 4 mm as.
Een 30 Amp Plush ESC werd ingebouwd samen met de ontvanger onder een plankje waarop de accu kon worden vast gestript.
Na opnieuw schilderen van de romp en bijwerken van de kleur op de vleugel en het aanbrengen van wat stickers werd het zwaartepunt bepaald.
Hoogte- en richtingsroer waren oorspronkelijk niet geverfd of beplakt, het balsa was daar alleen met vuller gelakt.
Dat kwam uit, hangend aan het oogje midden op de vleugel, met de neus naar beneden wijzend waarbij de neus 45 cm lager hangt dan de staart.
Hiervoor moest nog ca. 200 g lood rondom de motor worden aangebracht.
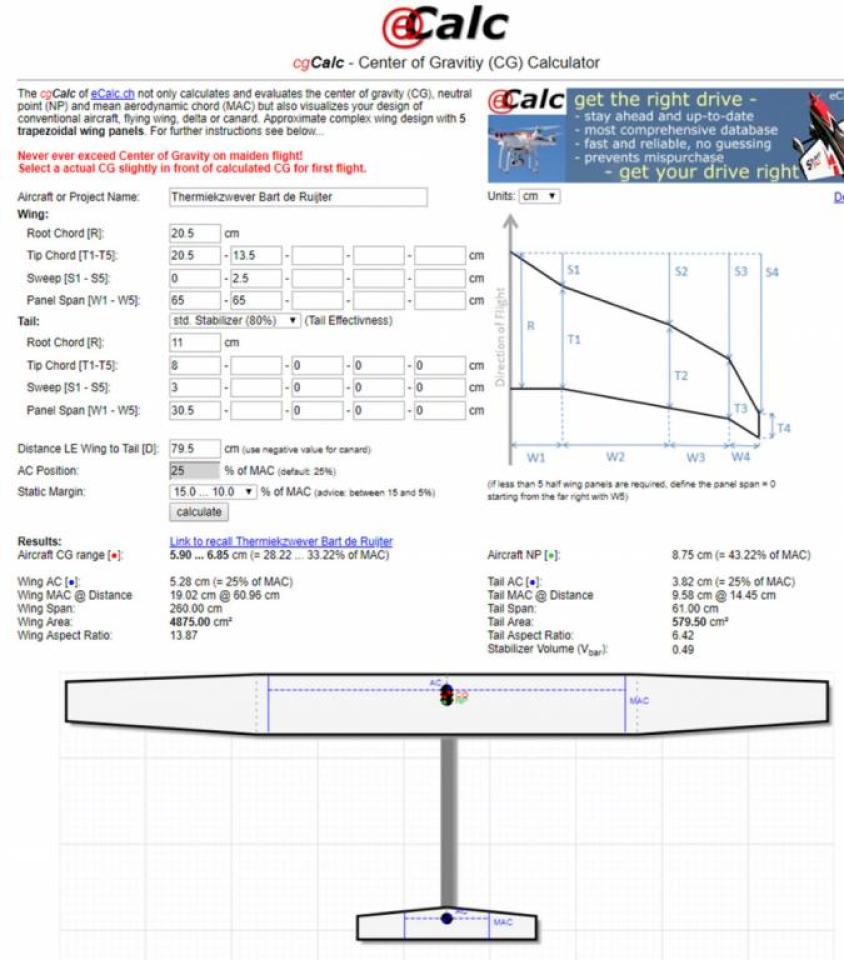
Met cgCalc werd ook nog een berekening gemaakt voor het CG.
Klik op een klein foto'tje om de grote diashow te starten.